Su funcionamiento es bastante sencillo, pero tiene partes interesantes de desarrollo entorno al algoritmo para detección de lineas negras. La parte mas importante esta en el sensor CNY70 el cual consta de un emisor y receptor de infrarrojo en una misma capsula.
cuando una onda de luz infrarroja choca contra una superficie blanca o clara, rebota hacia el receptor, el cual generara una señal lógica de uno si la superficie es blanca o cero si es negra.
En realidad para poder trabajar directamente con un PIC, hay que acomodar la señal con un integrado 40106, El cual es un integrado con lógica negada (NOT) o tambien conocido como Schmitt Trigger.
cuando una onda de luz infrarroja choca contra una superficie blanca o clara, rebota hacia el receptor, el cual generara una señal lógica de uno si la superficie es blanca o cero si es negra.
En realidad para poder trabajar directamente con un PIC, hay que acomodar la señal con un integrado 40106, El cual es un integrado con lógica negada (NOT) o tambien conocido como Schmitt Trigger.
Diagrama esquemático de la conexión del CNY70 y el 40106
en la pagina de r-luis hay excelente información al respecto, donde se puede ver mucha información técnica y posibilidades de configuración.
Este robot (una variación del presentado en la FUDCON de panama), tiene un sensor CNY70 sobre la rueda libre al frente del robot aproximadamente a 5 mm del piso. Se pone el robot sobre la derecha de la linea negra y cuando se inicia el algoritmo, se enciende el motor izquierdo hasta que toque la linea negra y se apaga el motor izquierdo y se prende el motor derecho hasta llegar al blanco y así avanzara emulando el andar de una persona no vidente con su bastón.
con dos sensores se puede conseguir un mejor rendimiento y velocidad, pero con un sensor es mas fácil de diseñar.
 Sensor CNY70 visto de frente
Sensor CNY70 visto de frente
 Sensor CNY70 de costado
Sensor CNY70 de costado
 robot con plataforma para la netbook
robot con plataforma para la netbook
 Placas con el integrado 40106 de control y el l293D para los motores
Placas con el integrado 40106 de control y el l293D para los motores
Video del robot
Este robot (una variación del presentado en la FUDCON de panama), tiene un sensor CNY70 sobre la rueda libre al frente del robot aproximadamente a 5 mm del piso. Se pone el robot sobre la derecha de la linea negra y cuando se inicia el algoritmo, se enciende el motor izquierdo hasta que toque la linea negra y se apaga el motor izquierdo y se prende el motor derecho hasta llegar al blanco y así avanzara emulando el andar de una persona no vidente con su bastón.
con dos sensores se puede conseguir un mejor rendimiento y velocidad, pero con un sensor es mas fácil de diseñar.
 Sensor CNY70 visto de frente
Sensor CNY70 visto de frente Sensor CNY70 de costado
Sensor CNY70 de costado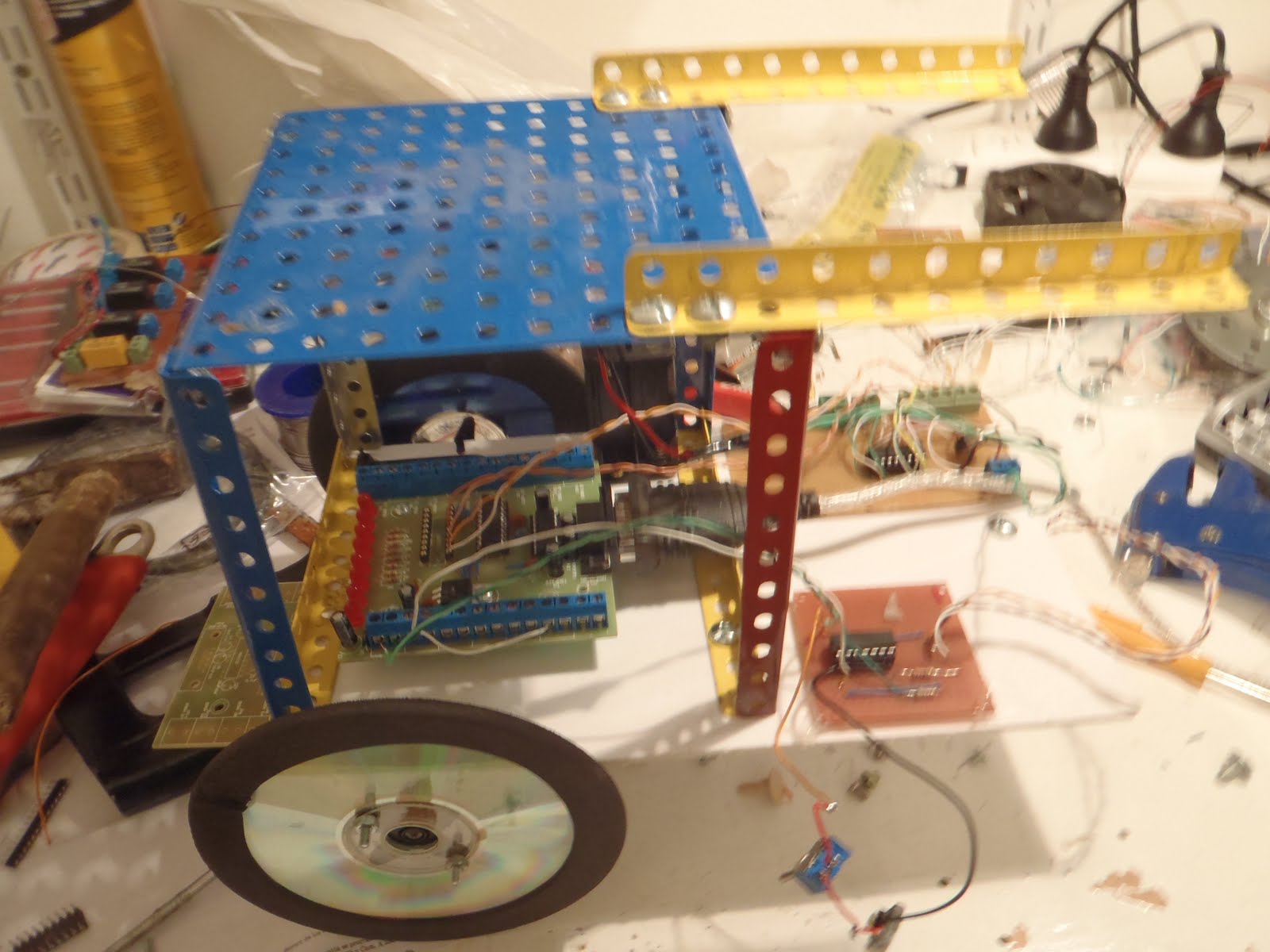 robot con plataforma para la netbook
robot con plataforma para la netbook Placas con el integrado 40106 de control y el l293D para los motores
Placas con el integrado 40106 de control y el l293D para los motoresVideo del robot
Se puede ver como en la primera vuelta el robot "se pierde" por cruzar la linea y no ubicar el espacio blanco. Con dos sensores se puede lograr un mejor rendimiento y estabilidad (y velocidad).